{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 cn_x 的问题《【分享】PID控制的通俗理解——转帖》','https://www.xiaopingtou.cn/q-175012.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
很多同学都不清楚PID是个什么东西,因为很多不是自动化的学生。他们开口就要资料,要程序。
这是明显的学习方法不对,起码,首先,你要理解PID是个什么东西。
本文以通俗的理解,以小车纵向控制举例说明PID的一些理解。
首先,为什么要做PID?
由于外界原因,小车的实际速度有时不稳定,这是其一,
要让小车以最快的时间达达到既定的目标速度,这是其二。
速度控制系统是闭环,才能满足整个系统的稳定要求,必竟速度是系统参数之一,这是其三.
小车调速肯定不是线性的,外界因素那么多,没人能证明是线性的。如果是线性的,直接用P就可以了。
比如在PWM=60%时,速度是2M/S,那么你要它3M/S,就把PWM提高到90%。因为90/60=3/2,这样一来太完美了。
完美是不可能的。
那么不是线性的,要怎么怎么控制PWM使速度达到即定的速度呢?即要快,又要准,又要狠。(即快准狠
)系统这个速度的调整过程就必须通过某个算法调整,一般PID就是这个所用的算法。
可能你会想到,如果通过编码器测得现在的速度是2.0m/s,要达到2.3m/s的速度,那么我把pwm增大一点不
就行了吗?是的,增大pwm多少呢?必须要通过算法,因为PWM和速度是个什么关系,对于整个系统来说,谁也
不知道。要一点一点的试,加个1%,不够,再加1%还是不够,那么第三次你还会加1%吗?很有可能就加2%了。
通过PID三个参数得到一个表达式:△PWM=a *△V1+b *△V2+c *△V3,a b c是通过PID的那个长长的公式展开
,然后约简后的数字,△V1 ,△V2 ,△V3 此前第一次调整后的速度差 ,第二次调整后的速度差,第三次。。
。。。一句话,PID要使当前速度达到目标速度最快,需要建立如何调整pwm和速度之间的关系。
输入输出是什么:
输入就是前次速度,前前次速度,前前前次速度。
输出就是你的PWM应该增加或减小多少。
为了避免教科书公式化的说明,本文用口语化和通俗的语言描述。虽然不一定恰当,但意思差不多,就是那个事。如果要彻头彻尾地弄PID,建议多调试,写几个仿真程序。 PID一般有两种:位置式PID和增量式PID。在小车里一般用增量式,为什么呢?位置式PID的输出与过去的所有状态有关,计算时要对e(每一次的控制误差)进行累加,这个计算量非常大,而明没有必要。而且小车的PID控制器的输出并不是绝对数值,而是一个△,代表增多少,减多少。换句话说,通过增量PID算法,每次输出是PWM要增加多少或者减小多少,而不是PWM的实际值。下面均以增量式PID说明。 这里再说一下P、I、D三个参数的作用。P=Proportion,比例的意思,I是Integral,积分,D是Differential微分。打个比方,如果现在的输出是1,目标输出是100,那么P的作用是以最快的速度达到100,把P理解为一个系数即可;而I呢?大家学过高数的,0的积分才能是一个常数,I就是使误差为0而起调和作用;D呢?大家都知道微分是求导数,导数代表切线是吧,切线的方向就是最快到至高点的方向。这样理解,最快获得最优解,那么微分就是加快调节过程的作用了。公式本来需要推导的,我就不来这一套了。直接贴出来: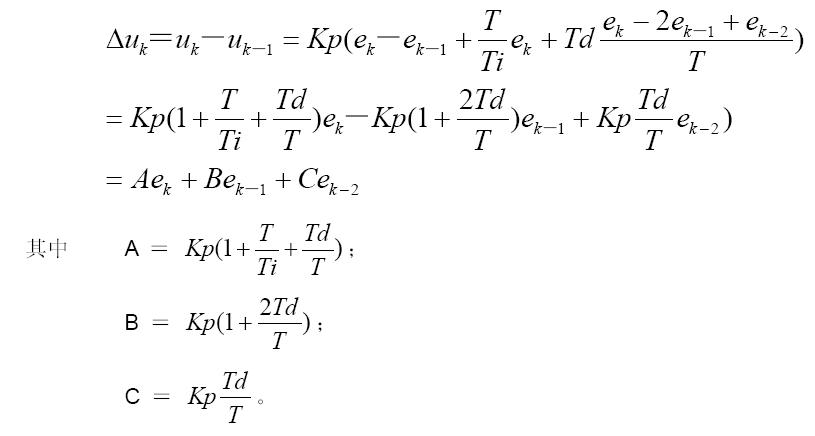
看看最后的结果:
△Uk=A*e(k)+B*e(k-1)+C*e(k-2)这里KP是P的值,TD是D的值,1/Ti是I的值,都是常数,哦,还有一个T,T是采样周期,也是已知。而A B C是由P I D换算来的,按这个公式,就可以简化计算量了,因为 P I D 是常数,那么A B C可以用一个宏表示。这样看来,只需要求e(k) e(k-1) e(k-2)就可以知道△Uk的值了,按照△Uk来调节PWM的大小就OK了。PID三个参数的确定有很多方法,不在本文讨论范围内。采样周期也是有据可依的,不能太大,也不能太小。
PID实际编程的过程的,要注意的东西还是有几点的。PID这东西可以做得很深。1 PID的诊定。凑试法,临界比例法,经验法。2 T的确定,采样周期应远小于过程的扰动信号的周期,在小车程序中一般是ms级别。3 目标速度何时赋值问题,如何更新新的目标速度?这个问题一般的人都乎略了。目标速度肯定不是个恒定的,那么何时改变目标速度呢?4 改变了目标速度,那么e(k) e(k-1) e(k-2)怎么改变呢?是赋0还是要怎么变?5 是不是PID要一直开着?6 error为多少时就可以当速度已达到目标?7 PID的优先级怎么处理,如果和图像采集有冲突怎么办?8 PID的输入是速度,输出是PWM,按理说PWM产生速度,但二者不是同一个东西,有没有问题?9 PID计算如何优化其速度?指针,汇编,移位?都可以试!//*****************************************************//定义PID结构体//*****************************************************typedef struct PID{ int SetPoint; //设定目标 Desired Value double Proportion; //比例常数 Proportional Const double Integral; //积分常数 Integral Const double Derivative; //微分常数 Derivative Const int LastError; //Error[-1] int PrevError; //Error[-2]} PID;//*****************************************************//定义相关宏//*****************************************************#define P_DATA 100#define I_DATA 0.6#define D_DATA 1#define HAVE_NEW_VELOCITY 0X01//*****************************************************//声明PID实体//*****************************************************static PID sPID;static PID *sptr = &sPID;//*****************************************************//PID参数初始化//*****************************************************void IncPIDInit(void){sptr->LastError = 0; //Error[-1]sptr->PrevError = 0; //Error[-2]sptr->Proportion = P_DATA; //比例常数 Proportional Constsptr->Integral = I_DATA; //积分常数Integral Constsptr->Derivative = D_DATA; //微分常数 Derivative Constsptr->SetPoint =100; 目标是100}//*****************************************************//增量式PID控制设计//*****************************************************int IncPIDCalc(int NextPoint){ int iError, iIncpid; //当前误差 iError = sptr->SetPoint - NextPoint; //增量计算 iIncpid = sptr->Proportion * iError //E[k]项 - sptr->Integral * sptr->LastError //E[k-1]项 + sptr->Derivative * sptr->PrevError; //E[k-2]项 sptr->PrevError = sptr->LastError; //存储误差,用于下次计算 sptr->LastError = iError; return(iIncpid); //返回增量值}Int g_CurrentVelocity;Int g_Flag; void main(void){ DisableInterruptInitMCu(); IncPIDInit();g_CurrentVelocity=0; //全局变量也初始化g_Flag=0; //全局变量也初始化EnableInterrupt; While(1){ if (g_Flag& HAVE_NEW_VELOCITY) { PWMOUT+= IncPIDCalc(CurrentVelocity); g_Flag&=~ HAVE_NEW_VELOCITY;}}}//****************************************//采样周期T//****************************************Interrrupt TIME void{ CurrentVelocity =GetCurrentVelocity; g_Flag|= HAVE_NEW_VELOCITY;}
这是明显的学习方法不对,起码,首先,你要理解PID是个什么东西。
本文以通俗的理解,以小车纵向控制举例说明PID的一些理解。
首先,为什么要做PID?
由于外界原因,小车的实际速度有时不稳定,这是其一,
要让小车以最快的时间达达到既定的目标速度,这是其二。
速度控制系统是闭环,才能满足整个系统的稳定要求,必竟速度是系统参数之一,这是其三.
小车调速肯定不是线性的,外界因素那么多,没人能证明是线性的。如果是线性的,直接用P就可以了。
比如在PWM=60%时,速度是2M/S,那么你要它3M/S,就把PWM提高到90%。因为90/60=3/2,这样一来太完美了。
完美是不可能的。
那么不是线性的,要怎么怎么控制PWM使速度达到即定的速度呢?即要快,又要准,又要狠。(即快准狠
)系统这个速度的调整过程就必须通过某个算法调整,一般PID就是这个所用的算法。
可能你会想到,如果通过编码器测得现在的速度是2.0m/s,要达到2.3m/s的速度,那么我把pwm增大一点不
就行了吗?是的,增大pwm多少呢?必须要通过算法,因为PWM和速度是个什么关系,对于整个系统来说,谁也
不知道。要一点一点的试,加个1%,不够,再加1%还是不够,那么第三次你还会加1%吗?很有可能就加2%了。
通过PID三个参数得到一个表达式:△PWM=a *△V1+b *△V2+c *△V3,a b c是通过PID的那个长长的公式展开
,然后约简后的数字,△V1 ,△V2 ,△V3 此前第一次调整后的速度差 ,第二次调整后的速度差,第三次。。
。。。一句话,PID要使当前速度达到目标速度最快,需要建立如何调整pwm和速度之间的关系。
输入输出是什么:
输入就是前次速度,前前次速度,前前前次速度。
输出就是你的PWM应该增加或减小多少。
为了避免教科书公式化的说明,本文用口语化和通俗的语言描述。虽然不一定恰当,但意思差不多,就是那个事。如果要彻头彻尾地弄PID,建议多调试,写几个仿真程序。 PID一般有两种:位置式PID和增量式PID。在小车里一般用增量式,为什么呢?位置式PID的输出与过去的所有状态有关,计算时要对e(每一次的控制误差)进行累加,这个计算量非常大,而明没有必要。而且小车的PID控制器的输出并不是绝对数值,而是一个△,代表增多少,减多少。换句话说,通过增量PID算法,每次输出是PWM要增加多少或者减小多少,而不是PWM的实际值。下面均以增量式PID说明。 这里再说一下P、I、D三个参数的作用。P=Proportion,比例的意思,I是Integral,积分,D是Differential微分。打个比方,如果现在的输出是1,目标输出是100,那么P的作用是以最快的速度达到100,把P理解为一个系数即可;而I呢?大家学过高数的,0的积分才能是一个常数,I就是使误差为0而起调和作用;D呢?大家都知道微分是求导数,导数代表切线是吧,切线的方向就是最快到至高点的方向。这样理解,最快获得最优解,那么微分就是加快调节过程的作用了。公式本来需要推导的,我就不来这一套了。直接贴出来:
看看最后的结果:
△Uk=A*e(k)+B*e(k-1)+C*e(k-2)这里KP是P的值,TD是D的值,1/Ti是I的值,都是常数,哦,还有一个T,T是采样周期,也是已知。而A B C是由P I D换算来的,按这个公式,就可以简化计算量了,因为 P I D 是常数,那么A B C可以用一个宏表示。这样看来,只需要求e(k) e(k-1) e(k-2)就可以知道△Uk的值了,按照△Uk来调节PWM的大小就OK了。PID三个参数的确定有很多方法,不在本文讨论范围内。采样周期也是有据可依的,不能太大,也不能太小。
PID实际编程的过程的,要注意的东西还是有几点的。PID这东西可以做得很深。1 PID的诊定。凑试法,临界比例法,经验法。2 T的确定,采样周期应远小于过程的扰动信号的周期,在小车程序中一般是ms级别。3 目标速度何时赋值问题,如何更新新的目标速度?这个问题一般的人都乎略了。目标速度肯定不是个恒定的,那么何时改变目标速度呢?4 改变了目标速度,那么e(k) e(k-1) e(k-2)怎么改变呢?是赋0还是要怎么变?5 是不是PID要一直开着?6 error为多少时就可以当速度已达到目标?7 PID的优先级怎么处理,如果和图像采集有冲突怎么办?8 PID的输入是速度,输出是PWM,按理说PWM产生速度,但二者不是同一个东西,有没有问题?9 PID计算如何优化其速度?指针,汇编,移位?都可以试!//*****************************************************//定义PID结构体//*****************************************************typedef struct PID{ int SetPoint; //设定目标 Desired Value double Proportion; //比例常数 Proportional Const double Integral; //积分常数 Integral Const double Derivative; //微分常数 Derivative Const int LastError; //Error[-1] int PrevError; //Error[-2]} PID;//*****************************************************//定义相关宏//*****************************************************#define P_DATA 100#define I_DATA 0.6#define D_DATA 1#define HAVE_NEW_VELOCITY 0X01//*****************************************************//声明PID实体//*****************************************************static PID sPID;static PID *sptr = &sPID;//*****************************************************//PID参数初始化//*****************************************************void IncPIDInit(void){sptr->LastError = 0; //Error[-1]sptr->PrevError = 0; //Error[-2]sptr->Proportion = P_DATA; //比例常数 Proportional Constsptr->Integral = I_DATA; //积分常数Integral Constsptr->Derivative = D_DATA; //微分常数 Derivative Constsptr->SetPoint =100; 目标是100}//*****************************************************//增量式PID控制设计//*****************************************************int IncPIDCalc(int NextPoint){ int iError, iIncpid; //当前误差 iError = sptr->SetPoint - NextPoint; //增量计算 iIncpid = sptr->Proportion * iError //E[k]项 - sptr->Integral * sptr->LastError //E[k-1]项 + sptr->Derivative * sptr->PrevError; //E[k-2]项 sptr->PrevError = sptr->LastError; //存储误差,用于下次计算 sptr->LastError = iError; return(iIncpid); //返回增量值}Int g_CurrentVelocity;Int g_Flag; void main(void){ DisableInterruptInitMCu(); IncPIDInit();g_CurrentVelocity=0; //全局变量也初始化g_Flag=0; //全局变量也初始化EnableInterrupt; While(1){ if (g_Flag& HAVE_NEW_VELOCITY) { PWMOUT+= IncPIDCalc(CurrentVelocity); g_Flag&=~ HAVE_NEW_VELOCITY;}}}//****************************************//采样周期T//****************************************Interrrupt TIME void{ CurrentVelocity =GetCurrentVelocity; g_Flag|= HAVE_NEW_VELOCITY;}
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
一周热门 更多>