{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 山外メ雲ジ 的问题《K60书籍推荐:《轻松玩转ARM Cortex-M4微控制器-基于Kinetis K60》》','https://www.xiaopingtou.cn/q-173120.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
代码下载:
 山外K60参考代码V5.1(支持FX和DNZ,基于IAR 6.3版本).rar
(1.62 MB, 下载次数: 388)
2014-10-20 15:01 上传
点击文件名下载附件
山外K60参考代码V5.1(支持FX和DNZ,基于IAR 6.3版本).rar
(1.62 MB, 下载次数: 388)
2014-10-20 15:01 上传
点击文件名下载附件
《轻松玩转ARM Cortex-M4微控制器-基于Kinetis K60》是一本适合初学者进阶的书籍。本书针对初学者对C语言、时序图、Datasheet不熟悉,重点讲解这方面的内容。从我自身经验来看,基础知识的缺乏是影响学习进度的主要原因。只要基础扎实,那么任意来一款单片机,Datasheet+官方例程,基本上可以快速上手,甚至写成自己的库。
有图有真相(出于合同限制,不能提供PDF文档的哦):
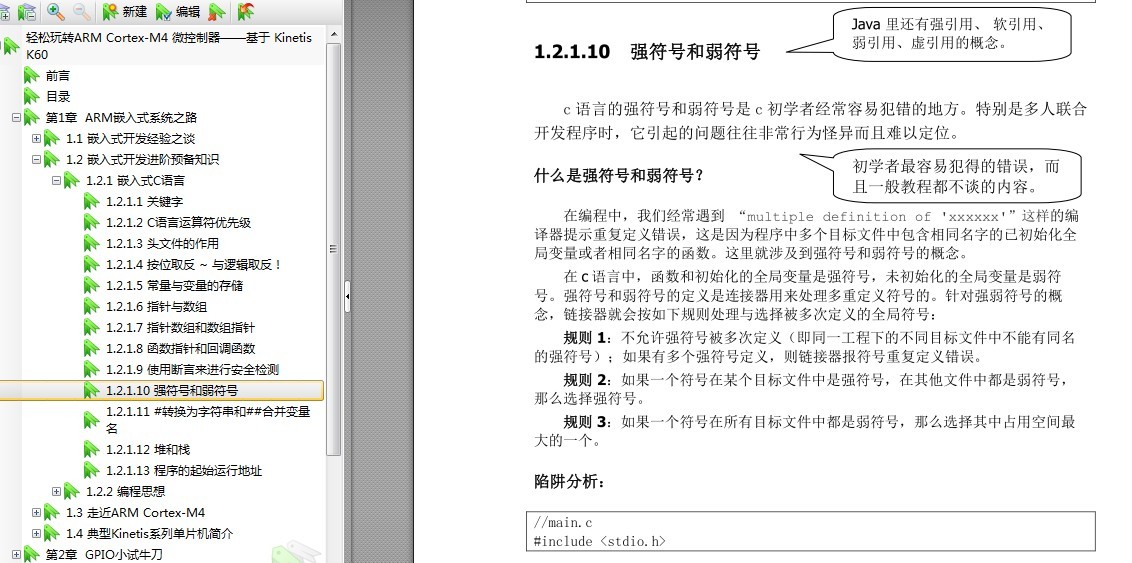
强化C语言基础知识
 160350czw2yg4k445rlls4.jpg (102.16 KB, 下载次数: 0)
下载附件
2014-10-20 14:58 上传
160350czw2yg4k445rlls4.jpg (102.16 KB, 下载次数: 0)
下载附件
2014-10-20 14:58 上传
书本目录
轻松玩转ARM CORTEX-M4 微控制器——基于 KINETIS K60
第1章 ARM嵌入式系统之路
1.1 嵌入式开发经验之谈
1.1.1 嵌入式技术知识结构
1.1.2 嵌入式成长之路
1.1.2.1 从学生成为工程师
1.1.3 职业规划
1.2 嵌入式开发进阶预备知识
1.2.1 嵌入式C语言
1.2.1.1 关键字
1.2.1.2 C语言运算符优先级
1.2.1.3 头文件的作用
1.2.1.4 按位取反 ~ 与逻辑取反!
1.2.1.5 常量与变量的存储
1.2.1.6 指针与数组
1.2.1.7 指针数组和数组指针
1.2.1.8 函数指针和回调函数
1.2.1.9 使用断言来进行安全检测
1.2.1.10 强符号和弱符号
1.2.1.11 #转换为字符串和##合并变量名
1.2.1.12 堆和栈
1.2.1.13 程序的起始运行地址
1.2.2 编程思想
1.2.1.14 软件分层
1.2.1.15 状态机思想
1.3 走近ARM Cortex-M4
1.3.1 M4内核介绍
1.3.2 基于Cortex-M的CMSIS库
1.4 典型Kinetis系列单片机简介
1.4.1 Kinetis简介
1.4.2 K60P144的管脚功能和硬件电路
1.4.2.1 电源管脚
1.4.2.2 调试/编程接口
1.4.2.3 复位电路
1.4.2.4 晶振电路
1.4.2.5 管脚复用
1.4.3 Kinetis系列的编程介绍
1.4.3.1 IAR新建工程
1.4.3.2 IAR使用说明
1.4.3.3 IAR在线调试
1.4.3.4 K60的启动分析
1.4.3.5 ROM、RAM启动工作原理和ICF 文件讲解
1.4.3.6 中断函数的实现方法
第2章 GPIO小试牛刀
2.1 PORT端口控制和中断
2.1.1 PORT模块简介
2.1.1.1 PORT模块特性
2.1.2 PORT模块寄存器
2.1.3 PORT编程要点
2.1.4 PORT应用实例
2.1.4.1 PORT模块API的设计
2.1.4.2 按键中断例程
2.2 GPIO
2.2.1 GPIO模块简介
2.2.2 GPIO模块寄存器
2.2.3 GPIO编程要点
2.2.4 GPIO应用实例
2.2.4.1 GPIO模块API的设计
2.2.4.2 LED流水灯
2.2.4.3 按键例程(循环扫描法和定时扫描法)
第3章 串行通信的时序分析
3.1 UART串口通信
3.1.1 UART简介
3.1.2 串口时序分析
3.1.3 UART模块寄存器
3.1.4 UART应用实例
3.1.4.1 UART模块API的设计
3.1.4.2 串口查询接收与发送
3.1.4.3 串口中断接收
3.2 I2C
3.2.1 I2C简介
3.2.2 I2C时序分析
3.2.2.1 位传输
3.2.2.2 起始和停止条件
3.2.2.3 传输数据
3.2.2.4 仲裁和时钟发生
3.2.2.5 7位的地址格式
3.2.2.6 7 位寻址
3.2.3 I2C模块寄存器
3.2.4 I2C应用实例
3.2.4.1 I2C模块API的设计
3.2.4.2 重力加速度 MMA7455应用
3.3 SPI
3.3.1 SPI简介
3.3.2 SPI时序分析
3.3.3 SPI模块寄存器
3.3.4 SPI应用实例
3.3.4.1 SPI模块API的设计
3.3.4.2 NRF24L01+无线传输应用
第4章 时钟模块
4.1 MCG系统时钟模块
4.1.1 MCG系统时钟模块简介
4.1.2 MCG模块寄存器
4.1.3 MCG编程要点
4.2 WDOG看门狗定时器
4.2.1 看门狗定时器简介
4.2.2 WDOG编程要点
4.2.3 看门狗WDOG应用实例
4.2.3.1 WDOG模块API的设计
4.2.3.2 WDOG模块的测试例程
4.3 Flex定时器FTM
4.3.1 FTM简介
4.3.2 FTM模块寄存器
4.3.2.1 FTM编程要点
4.3.3 FTM应用实例
4.3.3.1 PWM——驱动
4.3.3.2 输入捕捉——捕捉信号频率
4.3.3.3 正交解码——编码器脉冲计数
4.4 LPTMR低功耗定时器
4.4.1 LPTMR简介
4.4.1.1 K60 LPTMR 特性
4.4.2 LPTMR模块寄存器
4.4.2.1 LPTMR寄存器内存地址图
4.4.2.2 LPTMR寄存器详解
4.4.2.3 LPTMR编程要点
4.4.3 LPTMR应用实例
4.4.3.1 LPMTR定时中断闪烁LED
4.4.3.2 LPTMR脉冲累加计数应用
4.5 PIT周期中断定时器
4.5.1 PIT简介
4.5.1.1 K60 PIT 特性
4.5.2 PIT 模块寄存器
4.5.2.1 PIT寄存器结构体定义
4.5.2.2 PIT寄存器详解
4.5.2.3 PIT编程要点
4.5.3 PIT应用实例
4.5.3.1 PIT周期中断闪烁LED
4.6 RTC实时时钟计数器
4.6.1 RTC简介
4.6.1.1 K60 RTC 特性
4.6.2 RTC编程要点
4.6.3 RTC应用实例
4.6.3.1 RTC设定时间与查询时间应用
第5章 模数转换
5.1 ADC
5.1.1 ADC简介
5.1.1.1 ADC常见的应用
5.1.1.2 ADC常见的几种类型
5.1.1.3 ADC的信号输入模型
5.1.1.4 ADC性能指标
5.1.1.5 K60自带ADC简介
5.1.2 ADC模块寄存器
5.1.2.1 ADC寄存器内存地址图
5.1.2.2 ADC寄存器详解
5.1.2.3 ADC编程要点
5.1.3 ADC应用实例
5.1.3.1 ADC测量电压
5.2 DAC
5.2.1 DAC简介
5.2.1.1 DAC性能指标
5.2.1.2 K60自带DAC简介
5.2.2 DAC模块寄存器
5.2.2.1 DAC寄存器内存地址图
5.2.2.2 DAC寄存器详解
5.2.2.3 DAC编程要点
5.2.3 DAC应用实例
5.2.3.1 DAC输出正弦波
第6章 DMA
6.1 DMA简介
6.1.1 K60 DMA简介
6.2 DMA模块寄存器
6.2.1 DMA寄存器详解
6.3 DMA应用实例
6.3.1 GPIO到内存的DMA传输
第7章 FLASH
7.1 Flash简介
7.1.1 K60 FLASH简介
7.1.1.1 程序Flash特点
7.1.1.2 FlexNVM特点
7.1.1.3 FlexRAM特点
7.2 FLASH编程要点
7.3 Flash读写应用
第8章 常用总线模块
8.1 CAN总线
8.1.1 CAN简介
8.1.1.1 CAN总线协议分析
8.1.1.2 K60 CAN简介
8.1.2 CAN编程要点
8.1.2.1 CAN波特率的配置
8.1.2.2 CAN掩码设置
8.1.2.3 CAN接收缓冲区使能
8.1.2.4 CAN发送
8.1.2.5 CAN接收
8.1.3 8.1.2 CAN总线应用
8.1.3.1 CAN总线环回实验分析
8.2 外部总线 Flex Bus
8.2.1 TFT-LCD简介
8.2.1.1 ILI9341控制器结构
8.2.1.2 像素点的数据格式
8.2.1.3 ILI9341通信协议8080
8.2.2 K60 FlexBus驱动LCD
8.2.2.1 FlexBus实现8080协议
8.2.2.2 LCD驱动函数的实现
8.2.2.3 LCD显示应用
第9章 SDHC
9.1 SD介绍
9.1.1 SD/MMC卡的分类
9.1.2 SD/MMC卡的最大容量
9.1.3 SD/MMC卡的速度级别
9.1.4 SD卡内部结构及寄存器
9.1.5 SD卡的存储组织结构图
9.1.6 SD卡接口
9.2 初识SDHC协议
9.2.1 SD卡时序
9.2.2 SD卡数据包格式
9.2.3 SD卡CMD命令介绍
9.2.4 SD卡命令响应
9.2.5 SD卡的工作状态及操作模式
9.2.6 SD卡时钟控制
9.3 SDHC关键代码分析
9.3.1 初始化SDHC模块
9.3.2 初始化SD卡
9.3.3 SD卡读扇区
9.3.4 SD卡写扇区
9.4 FatFS库介绍
9.4.1 什么是文件系统?
9.4.2 FATFS库简介
9.4.3 FatFS 常用API接口
9.4.4 FatFS底层函数的实现
9.5 SD卡大容量读写应用
第10章 USB通信模块
10.1 初识USB
10.1.1 USB简介
10.1.2 USB总线拓扑结构
10.1.3 USB信号和电气特性
10.1.4 USB通信模型
10.1.5 USB通信数据流
10.1.6 USB数据格式
10.1.6.1 包的组成
10.1.6.2 包的种类
10.1.6.3 传输类型
10.1.6.4 USB枚举
10.2 USB通信应用实例
10.2.1 USB描述符
10.2.1.1 设备描述符
10.2.1.2 配置描述符
10.2.1.3 接口描述符
10.2.1.4 端点描述符
10.2.1.5 字符串描述符
10.2.2 USB SETUP包处理
10.2.3 USB端点的发送和接收
10.2.4 虚拟串口API接口
参考文献
配套例程
例程目录:
│
├─第二章
│ ├─GPIO_KEY_LOOP
│ ├─GPIO_KEY_TIMEING
│ ├─GPIO_LED
│ └─PORT_KEY
├─第三章
│ ├─I2C_MMA7455
│ ├─SPI_NRF24L01+
│ │ ├─SPI_NRF24L01+_发送模块
│ │ └─SPI_NRF24L01+_接收模块
│ ├─UART_INT
│ └─UART_LOOP
├─第四章
│ ├─FTM_INPUT_KEY
│ ├─FTM_PWM_示波器
│ ├─FTM_正交解码
│ ├─LPTMR_定时
│ ├─LPTMR_延时
│ ├─LPTMR_脉冲计数
│ ├─LPTMR_计时
│ ├─PIT_定时
│ ├─PIT_延时
│ ├─PIT_计时
│ ├─RTC
│ ├─SysTick_定时
│ ├─SysTick_延时
│ └─WDOG
├─第五章
│ ├─ADC
│ └─DAC_正弦波
├─第六章
│ ├─DMA_读取GPIO电平到内存
│ ├─DMA_读取GPIO电平到内存(中断恢复目的地址)
│ └─DMA_鹰眼摄像头OV7725串口显示
├─第七章
│ └─Flash
├─第八章
│ ├─can_正常模式
│ │ ├─can_节点A
│ │ └─can_节点B
│ ├─can_环回模式
│ └─flexbus_8080_TFT
├─第九章
│ └─SDHC
├─第十章
│ └─USB_COM
└─书外的参考例程
├─LCD_BMP
├─LCD_三轴陀螺仪
├─LCD_摄像头
├─LCD_摄像头_无线传输
│ ├─摄像头模块(可按键调试)
│ └─调试器模块(可按键调试)
├─LCD_摄像头_无线传输_无线调试
│ ├─摄像头模块(可按键调试)
│ └─调试器模块(可按键调试)
├─LCD_激光计时器
├─LCD_线性CCD
├─LCD_线性CCD_无线传输
│ ├─线性CCD模块(可按键调试)
│ └─调试器模块(可按键调试)
├─电机驱动
│ ├─1.电机驱动四路半桥测试(常规和滑行)
│ ├─2.电机驱动两路全桥正反转测试(常规)
│ └─3.电机驱动变速测试(常规与滑行)
└─舵机
└─舵机左右摆动
例程下载地址:
山外K60参考代码V5.1(支持FX和DNZ,基于IAR 6.3版本).rar
(1.62 MB, 下载次数: 388)
2014-10-20 15:01 上传
点击文件名下载附件
《轻松玩转ARM Cortex-M4微控制器-基于Kinetis K60》是一本适合初学者进阶的书籍。本书针对初学者对C语言、时序图、Datasheet不熟悉,重点讲解这方面的内容。从我自身经验来看,基础知识的缺乏是影响学习进度的主要原因。只要基础扎实,那么任意来一款单片机,Datasheet+官方例程,基本上可以快速上手,甚至写成自己的库。
有图有真相(出于合同限制,不能提供PDF文档的哦):
强化C语言基础知识
160350czw2yg4k445rlls4.jpg (102.16 KB, 下载次数: 0)
下载附件
2014-10-20 14:58 上传
书本目录
轻松玩转ARM CORTEX-M4 微控制器——基于 KINETIS K60
第1章 ARM嵌入式系统之路
1.1 嵌入式开发经验之谈
1.1.1 嵌入式技术知识结构
1.1.2 嵌入式成长之路
1.1.2.1 从学生成为工程师
1.1.3 职业规划
1.2 嵌入式开发进阶预备知识
1.2.1 嵌入式C语言
1.2.1.1 关键字
1.2.1.2 C语言运算符优先级
1.2.1.3 头文件的作用
1.2.1.4 按位取反 ~ 与逻辑取反!
1.2.1.5 常量与变量的存储
1.2.1.6 指针与数组
1.2.1.7 指针数组和数组指针
1.2.1.8 函数指针和回调函数
1.2.1.9 使用断言来进行安全检测
1.2.1.10 强符号和弱符号
1.2.1.11 #转换为字符串和##合并变量名
1.2.1.12 堆和栈
1.2.1.13 程序的起始运行地址
1.2.2 编程思想
1.2.1.14 软件分层
1.2.1.15 状态机思想
1.3 走近ARM Cortex-M4
1.3.1 M4内核介绍
1.3.2 基于Cortex-M的CMSIS库
1.4 典型Kinetis系列单片机简介
1.4.1 Kinetis简介
1.4.2 K60P144的管脚功能和硬件电路
1.4.2.1 电源管脚
1.4.2.2 调试/编程接口
1.4.2.3 复位电路
1.4.2.4 晶振电路
1.4.2.5 管脚复用
1.4.3 Kinetis系列的编程介绍
1.4.3.1 IAR新建工程
1.4.3.2 IAR使用说明
1.4.3.3 IAR在线调试
1.4.3.4 K60的启动分析
1.4.3.5 ROM、RAM启动工作原理和ICF 文件讲解
1.4.3.6 中断函数的实现方法
第2章 GPIO小试牛刀
2.1 PORT端口控制和中断
2.1.1 PORT模块简介
2.1.1.1 PORT模块特性
2.1.2 PORT模块寄存器
2.1.3 PORT编程要点
2.1.4 PORT应用实例
2.1.4.1 PORT模块API的设计
2.1.4.2 按键中断例程
2.2 GPIO
2.2.1 GPIO模块简介
2.2.2 GPIO模块寄存器
2.2.3 GPIO编程要点
2.2.4 GPIO应用实例
2.2.4.1 GPIO模块API的设计
2.2.4.2 LED流水灯
2.2.4.3 按键例程(循环扫描法和定时扫描法)
第3章 串行通信的时序分析
3.1 UART串口通信
3.1.1 UART简介
3.1.2 串口时序分析
3.1.3 UART模块寄存器
3.1.4 UART应用实例
3.1.4.1 UART模块API的设计
3.1.4.2 串口查询接收与发送
3.1.4.3 串口中断接收
3.2 I2C
3.2.1 I2C简介
3.2.2 I2C时序分析
3.2.2.1 位传输
3.2.2.2 起始和停止条件
3.2.2.3 传输数据
3.2.2.4 仲裁和时钟发生
3.2.2.5 7位的地址格式
3.2.2.6 7 位寻址
3.2.3 I2C模块寄存器
3.2.4 I2C应用实例
3.2.4.1 I2C模块API的设计
3.2.4.2 重力加速度 MMA7455应用
3.3 SPI
3.3.1 SPI简介
3.3.2 SPI时序分析
3.3.3 SPI模块寄存器
3.3.4 SPI应用实例
3.3.4.1 SPI模块API的设计
3.3.4.2 NRF24L01+无线传输应用
第4章 时钟模块
4.1 MCG系统时钟模块
4.1.1 MCG系统时钟模块简介
4.1.2 MCG模块寄存器
4.1.3 MCG编程要点
4.2 WDOG看门狗定时器
4.2.1 看门狗定时器简介
4.2.2 WDOG编程要点
4.2.3 看门狗WDOG应用实例
4.2.3.1 WDOG模块API的设计
4.2.3.2 WDOG模块的测试例程
4.3 Flex定时器FTM
4.3.1 FTM简介
4.3.2 FTM模块寄存器
4.3.2.1 FTM编程要点
4.3.3 FTM应用实例
4.3.3.1 PWM——驱动
4.3.3.2 输入捕捉——捕捉信号频率
4.3.3.3 正交解码——编码器脉冲计数
4.4 LPTMR低功耗定时器
4.4.1 LPTMR简介
4.4.1.1 K60 LPTMR 特性
4.4.2 LPTMR模块寄存器
4.4.2.1 LPTMR寄存器内存地址图
4.4.2.2 LPTMR寄存器详解
4.4.2.3 LPTMR编程要点
4.4.3 LPTMR应用实例
4.4.3.1 LPMTR定时中断闪烁LED
4.4.3.2 LPTMR脉冲累加计数应用
4.5 PIT周期中断定时器
4.5.1 PIT简介
4.5.1.1 K60 PIT 特性
4.5.2 PIT 模块寄存器
4.5.2.1 PIT寄存器结构体定义
4.5.2.2 PIT寄存器详解
4.5.2.3 PIT编程要点
4.5.3 PIT应用实例
4.5.3.1 PIT周期中断闪烁LED
4.6 RTC实时时钟计数器
4.6.1 RTC简介
4.6.1.1 K60 RTC 特性
4.6.2 RTC编程要点
4.6.3 RTC应用实例
4.6.3.1 RTC设定时间与查询时间应用
第5章 模数转换
5.1 ADC
5.1.1 ADC简介
5.1.1.1 ADC常见的应用
5.1.1.2 ADC常见的几种类型
5.1.1.3 ADC的信号输入模型
5.1.1.4 ADC性能指标
5.1.1.5 K60自带ADC简介
5.1.2 ADC模块寄存器
5.1.2.1 ADC寄存器内存地址图
5.1.2.2 ADC寄存器详解
5.1.2.3 ADC编程要点
5.1.3 ADC应用实例
5.1.3.1 ADC测量电压
5.2 DAC
5.2.1 DAC简介
5.2.1.1 DAC性能指标
5.2.1.2 K60自带DAC简介
5.2.2 DAC模块寄存器
5.2.2.1 DAC寄存器内存地址图
5.2.2.2 DAC寄存器详解
5.2.2.3 DAC编程要点
5.2.3 DAC应用实例
5.2.3.1 DAC输出正弦波
第6章 DMA
6.1 DMA简介
6.1.1 K60 DMA简介
6.2 DMA模块寄存器
6.2.1 DMA寄存器详解
6.3 DMA应用实例
6.3.1 GPIO到内存的DMA传输
第7章 FLASH
7.1 Flash简介
7.1.1 K60 FLASH简介
7.1.1.1 程序Flash特点
7.1.1.2 FlexNVM特点
7.1.1.3 FlexRAM特点
7.2 FLASH编程要点
7.3 Flash读写应用
第8章 常用总线模块
8.1 CAN总线
8.1.1 CAN简介
8.1.1.1 CAN总线协议分析
8.1.1.2 K60 CAN简介
8.1.2 CAN编程要点
8.1.2.1 CAN波特率的配置
8.1.2.2 CAN掩码设置
8.1.2.3 CAN接收缓冲区使能
8.1.2.4 CAN发送
8.1.2.5 CAN接收
8.1.3 8.1.2 CAN总线应用
8.1.3.1 CAN总线环回实验分析
8.2 外部总线 Flex Bus
8.2.1 TFT-LCD简介
8.2.1.1 ILI9341控制器结构
8.2.1.2 像素点的数据格式
8.2.1.3 ILI9341通信协议8080
8.2.2 K60 FlexBus驱动LCD
8.2.2.1 FlexBus实现8080协议
8.2.2.2 LCD驱动函数的实现
8.2.2.3 LCD显示应用
第9章 SDHC
9.1 SD介绍
9.1.1 SD/MMC卡的分类
9.1.2 SD/MMC卡的最大容量
9.1.3 SD/MMC卡的速度级别
9.1.4 SD卡内部结构及寄存器
9.1.5 SD卡的存储组织结构图
9.1.6 SD卡接口
9.2 初识SDHC协议
9.2.1 SD卡时序
9.2.2 SD卡数据包格式
9.2.3 SD卡CMD命令介绍
9.2.4 SD卡命令响应
9.2.5 SD卡的工作状态及操作模式
9.2.6 SD卡时钟控制
9.3 SDHC关键代码分析
9.3.1 初始化SDHC模块
9.3.2 初始化SD卡
9.3.3 SD卡读扇区
9.3.4 SD卡写扇区
9.4 FatFS库介绍
9.4.1 什么是文件系统?
9.4.2 FATFS库简介
9.4.3 FatFS 常用API接口
9.4.4 FatFS底层函数的实现
9.5 SD卡大容量读写应用
第10章 USB通信模块
10.1 初识USB
10.1.1 USB简介
10.1.2 USB总线拓扑结构
10.1.3 USB信号和电气特性
10.1.4 USB通信模型
10.1.5 USB通信数据流
10.1.6 USB数据格式
10.1.6.1 包的组成
10.1.6.2 包的种类
10.1.6.3 传输类型
10.1.6.4 USB枚举
10.2 USB通信应用实例
10.2.1 USB描述符
10.2.1.1 设备描述符
10.2.1.2 配置描述符
10.2.1.3 接口描述符
10.2.1.4 端点描述符
10.2.1.5 字符串描述符
10.2.2 USB SETUP包处理
10.2.3 USB端点的发送和接收
10.2.4 虚拟串口API接口
参考文献
配套例程
例程目录:
│
├─第二章
│ ├─GPIO_KEY_LOOP
│ ├─GPIO_KEY_TIMEING
│ ├─GPIO_LED
│ └─PORT_KEY
├─第三章
│ ├─I2C_MMA7455
│ ├─SPI_NRF24L01+
│ │ ├─SPI_NRF24L01+_发送模块
│ │ └─SPI_NRF24L01+_接收模块
│ ├─UART_INT
│ └─UART_LOOP
├─第四章
│ ├─FTM_INPUT_KEY
│ ├─FTM_PWM_示波器
│ ├─FTM_正交解码
│ ├─LPTMR_定时
│ ├─LPTMR_延时
│ ├─LPTMR_脉冲计数
│ ├─LPTMR_计时
│ ├─PIT_定时
│ ├─PIT_延时
│ ├─PIT_计时
│ ├─RTC
│ ├─SysTick_定时
│ ├─SysTick_延时
│ └─WDOG
├─第五章
│ ├─ADC
│ └─DAC_正弦波
├─第六章
│ ├─DMA_读取GPIO电平到内存
│ ├─DMA_读取GPIO电平到内存(中断恢复目的地址)
│ └─DMA_鹰眼摄像头OV7725串口显示
├─第七章
│ └─Flash
├─第八章
│ ├─can_正常模式
│ │ ├─can_节点A
│ │ └─can_节点B
│ ├─can_环回模式
│ └─flexbus_8080_TFT
├─第九章
│ └─SDHC
├─第十章
│ └─USB_COM
└─书外的参考例程
├─LCD_BMP
├─LCD_三轴陀螺仪
├─LCD_摄像头
├─LCD_摄像头_无线传输
│ ├─摄像头模块(可按键调试)
│ └─调试器模块(可按键调试)
├─LCD_摄像头_无线传输_无线调试
│ ├─摄像头模块(可按键调试)
│ └─调试器模块(可按键调试)
├─LCD_激光计时器
├─LCD_线性CCD
├─LCD_线性CCD_无线传输
│ ├─线性CCD模块(可按键调试)
│ └─调试器模块(可按键调试)
├─电机驱动
│ ├─1.电机驱动四路半桥测试(常规和滑行)
│ ├─2.电机驱动两路全桥正反转测试(常规)
│ └─3.电机驱动变速测试(常规与滑行)
└─舵机
└─舵机左右摆动
例程下载地址:
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
飞思卡尔在高校很热门啊,除了他的传统行业,但在外面用的人并不多,在公司里用什么MCU是要看性价比的。
一周热门 更多>